라이다란? (LIDAR)
LiDAR란?
LiDAR란 Light Detection And Ranging (빛을 통한 검출과 거리 측정)의 약칭으로,
근적외광 및 가시광, 자외선을 사용하여 대상물에 빛을 비추고, 그 반사광을 광 센서를 통해 검출하여 거리를 측정하는 리모트 센싱 (떨어진 위치에서 센서를 사용하여 검출) 방식을 뜻합니다.
Laser Imaging Detection And Ranging (레이저 화상 검출과 거리 측정)이라고도 하며, 대부분은 근적외 레이저 광을 펄스 상태로 조사 (照射)하고, 대상물에 닿아 반사될 때까지의 시간차를 계측합니다.
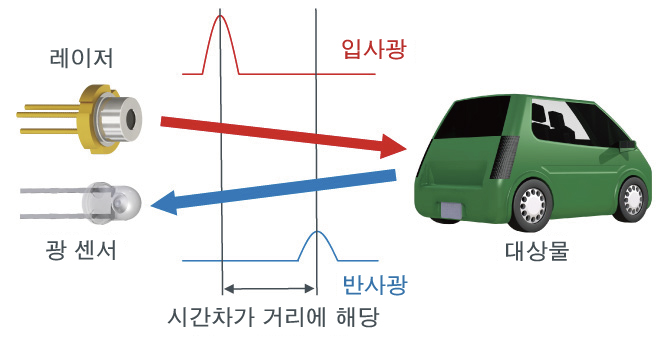
LiDAR는 대상물까지의 거리뿐만 아니라, 위치 및 형상까지 정확하게 검출할 수 있는 것이 특징입니다
LiDAR 용도 예
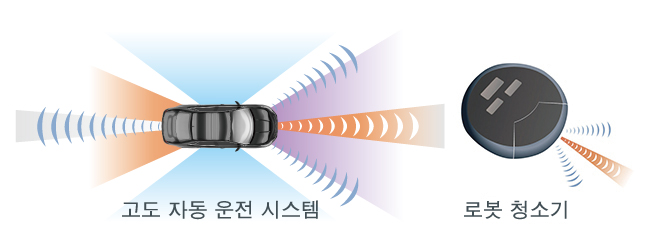
LiDAR 기술을 이용하는 것으로 가장 먼저 떠오르는 것은 자동차의 고도 자동 운전 시스템입니다. 완전 자동 운전 (레벨 5) 실현을 위해서는 꼭 필요한 기술이라고 일컬어지고 있습니다.
【LiDAR 용도 예】
기타, 민생기기 분야에서는 로봇 청소기 및 골프 거리 측정기, 산업기기 분야에서는 자동 반송차 (AGV) 및 서비스 로봇 등, 사람과 물체를 고정밀도로 검출하는 용도에 이용됩니다.
고도 자동 운전 시스템
ADAS (첨단 운전 지원 시스템 : 예를 들어 자동 브레이크 및 차선 이탈 방지 / LKA : Lane Keep Assist 등)에서는 카메라 방식과 밀리파 레이더 방식의 조합이 주류입니다. 그러나, 자동차의 자동 운전화를 위해서는 이러한 2가지 방식에 LiDAR를 추가한 3가지 방식의 조합이 필요시되고 있습니다.
고도의 자동 운전 시스템을 완성하기 위해서는 각각의 장점을 살리고 단점을 보완해야 하므로, 어느 하나라도 빠져서는 안되는 중요한 방식이라고 할 수 있습니다.
| 카메라에 찍힌 영상에서 물체를 식별 | 전파를 사용하여, 대상물에 닿아 되돌아 올 때까지의 시간차를 계측하여, 거리나 방향을 측정 | 레이저 광을 펄스 상태로 비추어, 대상물에 닿아 되돌아 올 때까지의 시간차를 계측하여, 거리나 위치, 형상을 3차원으로 측정 |
| ・촬영한 영상을 화상 처리함으로써 대상물을 식별할 수 있다. | ・야간이나 악천후 환경에서도 장해물 등의 방향과 거리를 계측할 수 있다. ・LiDAR 대비 저렴하다. |
・거리, 위치, 형상을 고정밀도로 검출한다. ・레이저 광을 다양한 방향으로 조사 (照射 / 走査)하여, 넓은 범위의 상황을 검출한다. |
| ・정확한 형상 및 위치 검출 곤란 ・악천후 및 야간 (어두운 곳), 역광에는 부적합 |
・작은 물체 검출 곤란 ・골판지 상자 등 반사율이 낮은 물체 검출 곤란 |
・악천후에서의 검출 능력 저하 ・밀리파 레이더 대비 비싸다. |